米兔积木机器人平衡版,done
昨天上午接近十点,前一天早上10点多买的米兔积木机器人终于到了。我的计划是这个东西可能前天下午就会到,所以前天下午之前我已经尽量把所有事情都做好,但实际上前天下午没有到,也正是因为没有到,所以我可以把已经做好的事情稍微再做得更好。一切准备就绪,就等着机器人到了以后我可以从容的开干。无论是工作的还是非工作的东西,我都要事先完成,好为机器人的搭建留出时间。
这套小米推出的第一款米兔积木已经是我入手的第四套米兔积木。当然,这个是不把指尖积木算上的。第一次搭建的是米兔智能积木,过程很愉快,当时用的是3D图纸。第二个搭建的是米兔积木机器人履带版。第三个是米兔积木矿山车。而最后一个就是昨天我收货的那个。因为前天下午已经准备就绪,所以昨天上午在等待送货到达的时候我还有一些时间。利用那些时间我把从网上下载回来的米兔积木机器人搭建手册的电子版先看了一遍。大概知道我即将要做些什么。152页的图纸我大概用了半个小时。
这套米兔积木机器人我一开始搭建就觉得一个很明显的问题——插销真的很麻烦。如果说米兔的积木还需要有什么改进的话,我觉得一定是插销。明明那些你觉得很容易理所当然的插洞事,但实际上操作的时候却不是一般的困难。绝大多数情况都是太紧了,无论是十字轴插在某些零件上,还是插销对接某些孔,但也不排除有些零件会松得匪夷所思,比如矿山车的12齿斜齿轮。米兔积木机器人的整个搭建过程总体来说比较顺利,比如说我用了51分钟就已经完成了机器人的腿部搭建。有点出乎我意料的是原来机器人躯干和手臂的搭建比腿部更麻烦。一直我都没把那当回事,因为躯干以及手臂的运动机构没有腿部复杂,很多东西都只是个装饰,但是要让装饰全部都丝丝入扣,这相当不容易。躯干的某个挡板是左右对称的,做完以后才发现其中一边有问题,所以我不得不把那两个都拆出来,研究一番,然后再装回去。第一次装配其中一边的时候我真的费了我九牛二虎之力,但是第二次在装的时候,感觉就轻松了很多。搭建手册只会告诉你,这些插销都要插在这些洞洞上,但是如果同时要插超过五个洞,要用什么顺序呢?用什么顺序很重要!一个平面插到另外一个平面的时候,通常需要全部都同时插入,否则插完一个再插另外一个,其它的非常有可能就对不上了。每次只是插一个或者两个,最多三个孔,搭建手册上可以不写要以什么顺序,但是一次要超过五个孔的话,我觉得他们可以在图纸上告诉读者,你可以以什么顺序去结合。这些不是必要的说明,这些是搭建技巧,可以让操作者少走弯路。
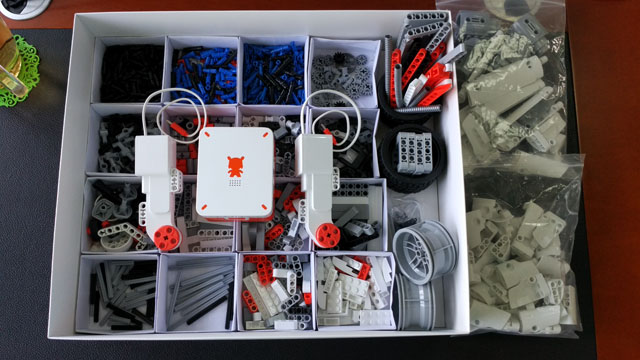
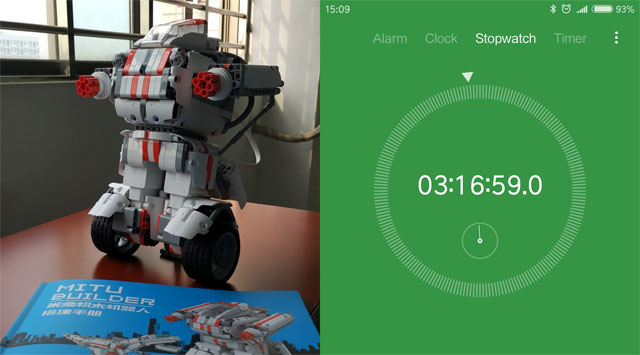
最终我用3小时16分59秒就完成了机器人的搭建,其中不包括一开始的准备工作,比如说拆包装,也比如说把里面的零件包分类。分类这个过程大概需要40分钟。在之前花这40分钟是绝对值得的,因为这个操作保证了以后搭建的时候你可以顺手拿来,而不需要把时间浪费在找某个零件上。这一次我用的主要分类方式跟上一次搭建米兔积木机器人履带版是一样的,连分类盒子也是上次那个,所以积木拿回来,我只是拆包,然后把零件分到之前已经折好的方形小纸盒里。16个小纸盒,外加旁边一条空间实际上还得加上两三个自封袋才能把一套积木处理好。之前我觉得零件分类大概是一个套路,你知道该怎么分以后往后就只是按部就班,保证有足够多的分类空间就好了。但昨天过后,我明白到每一套积木因为它们的零件构成虽然大体上相似,但实际上不同,所以得具体情况具体分析。有些时候你可以把某些零件合并,但在某些情况下,如果要合并的那两种零件自身的数量就很多所以你又得把它们分开处理,为了节省空间,把一些之前没有合起来的合起来。这个分分合合的过程没有固定标准,需要随机应变。当然,如果你已经有很多到积木,把它们全部都混起来了,那么你可能就需要几个整理箱去完成恰当的分类。
机器人装起来了,当然要试一下能不能动,以及运动情况如何。米兔积木机器人平衡版最大的特色是可以双轮站立,其自动平衡的过程之前我已经料想到会有一点曲折。后来发现原来那个复位键是必须按下去的。每个机器人新到且组装好以后必须按下复位键。然后机器人就会自动调平衡。调平衡这个过程是按下复位键,然后开机,等一等,搞定了,但是如果你不知道这个顺序,先开机又不按复位键,结果会很囧。平衡自动站立这个功能并不需要连接手机app就能实现。之前我天真地觉得调平衡以后机器人就能一动不动地站在那里,但实际上掌握平衡是一个动态的过程,所以调平衡成功以后,机器人还是会不断的各个方向晃动,如果地面不平甚至会一直向一个方向移动。虽然那些细微的晃动不会让你觉得它会倒下,但新手第一次遇到会莫名紧张,觉得不知道什么时候机器人就会摔个狗吃屎。
连接手机app开始手柄控制以后我发现一个很明显的问题,机器人轮子旁边有两个齿轮是用链条传动的,但是那两条链条非常容易崩开。分开以后要重新接上还很费劲。我又把说明书研究了半天,确认自己的搭建没有出错。零件的勾合是正确的。于是我就去度娘找原因,结果发现提出这个问题的人居然不多。搭建手册说每一条链条由15个零件构成。我组装这个链条的时候并没有数到底用了多少个零件,而是凭感觉用那么多个零件链条的状态张紧度刚好。后来我数了一下,我用的是14个零件。14个零件组成的链条即便不是电机快速带动,而是手动转动。试下几圈下来也会崩开。小链条这种东西我第一次用,原来这么儿戏。其实之前我也用过链条,那是米兔积木机器人履带版的履带,但是那个是大链条,很结实,不会出现这种情况。的确14个零件组成的小链条绷紧状态看上去会刚刚好,但也有一点点过于紧绷,所以非常容易崩开了,显然这不行,如果链条不能实现传动,轮子运动的时候,动力就不能通过两个万向节传递给手部的机关枪。我当然可以放弃机关枪这个运动功能,但是难道就没有一个把这里的结构改善的方法吗?抱着尝试的心态,我又给两个链条都加了一个零件。15个零件组成的小链条装在两个齿轮上,松松垮垮的,但即便松松垮垮,居然还能正常传动,不过正转或者反转的其中有一个会带动不起来。如网友所说,用14个零件链条张紧度刚好,15个零件,你会发现链条会有咔咔的声音,因为太长了。机器人运动测试的时候,15个零件的链条居然没有崩开,也没有卡机转不动,轮子带动的机关枪正常运转了,只是每次运动都会有一些很不愉快的咔咔声音。不完美但起码不出错。我觉得这个是设计的缺陷。什么链条和齿轮的连接居然会这样呢。链条长期以来都是这个模样的,所以问题可能不在链条上。既然链条会松开,为什么不直接用两个大一点的齿轮?那里的空间是足够的。不过如果是两个齿轮传动,当有问题不对劲的时候就没有链条的保护,上面的卡住的,轮子也刹车卡住了,于是机器人就趴街散架了。
我觉得自己已经有点从新手进化成中级科技积木玩家了。


